Огляд поточних розробок пристроїв управління ракетним паливом у стані мікрогравітації
Лев Юрійович Загаєвський
Дніпровський національний університет імені Олеся Гончара, Дніпро
Анатолій Федорович Санін
Дніпровський національний університет імені Олеся Гончара, Дніпро
Вступ
Політ космічного літального апарату характеризується поперемінною зміною активних та пасивних ділянок траєкторії. На пасивних ділянках траєкторії рідке паливо в баках КЛА знаходиться в стані зниженої або нульової гравітації. При цьому поверхня розділу рідина-газ викривляється під впливом форми баку та балансом сил на вільній поверхні. На пасивній ділянці польоту літальний апарат знаходиться під впливом різного роду сил:
• аеродинамічні сили;
• світловий тиск;
• гравітаційні аномалії;
• малі прискорення (викликані роботою двигунів орієнтації КЛА у просторі).
В умовах роботи маршового реактивного двигуна впливом цих сил можна знехтувати. Однак на пасивних ділянках траєкторії руху паливо в паливних баках здатне під дією навіть таких незначних факторів переміщуватися в любому напрямку по відношенню до забірного пристрою. Не виключено також, що парова фаза може потрапити до основної магістралі і це призведе до унеможливлення повторного пуску двигуна. Крім цього, компоненти палива при сильному плесканні перемішуються з газом наддуву, що порушить цілісність палива та його практичну придатність.
Виникає необхідність в управлінні положенням палива, аби якась частина компонентів завжди була близько до забірного пристрою та вільна від газів наддуву, тому необхідним є встановлення систем управління положенням та забезпечення чистоти палива від газової фази в стані невагомості та при реверсі тяги КЛА.
Такі системи підрозділяються за типом управляючих сил на:
• механічні;
• інерційні;
• поверхневого натягу;
• електростатичні.
Механічні системи управління паливом
Протягом багатьох років механічні системи відділення газової фази від палива використовувалися для КЛА. Найчастіше вони складаються з рухомих частин таких як: поршень, діафрагма або ж надувний еластичний міхур. Механічні системи мають досить високу питому вагу, не можуть задовільнити велику витрату з баку тому такі системи неможливо масштабувати. [11]. Переваги таких систем полягають у зменшенні ефекту плескання, а найбільшою перевагою являється легкість тестування на продуктивність в земних умовах.
Поршневі системи були найпершими, але їх низька продуктивність та герметичність підштовхнула на розвиток в сторону міхурів. Хоча навіть зараз з’являються нові поршневі системи [17] із застосуванням композиційних матеріалів (рис. 1).

Рис. 1 Прототип поршневої системи розділення фаз. Для наочності застосовано пластиковий лейнер та резиновий поршень [17]
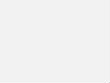
Системи що використовують міхури складаються з баку та міхура заповненого паливом (рис.2). В міхурі розташовують перфоровану трубку уздовж всього баку через яку паливо виходить з баку. Незважаючи на те міхурові системи мають більшу герметичність вони також мають більшу масу тому що площа мембрани міхура буде більша, ніж площа діафрагми. Також при опорожненні мембрана може звертатися та утворювати хвилі. Це заважає опорожненню бака тільки якщо не додати каркас, але це ще більше збільшить питому вагу. Міхури застосовувалися в місіях Джеміні та Меркурій [6].
Системи що складаються з діафрагм (рис. 3) також застосовують коли необхідно мінімізувати плескання а також звести до нуля хімічні реакції між компонентами палива та газами наддуву. Із-за того що мембрана повинна сягати всього баку її вага порівняно з вагою стінок майже однакова, що може впливати на центр ваги, тому такі системи не застосовуються в великих баках. Окрім того матеріал діафрагми піддається навантаженням, що постійно змінюються за напрямком, це викликає його втому та призводить до порушення герметичності або й навіть руйнуванню мембрани в цілому при довгому використанні [4].
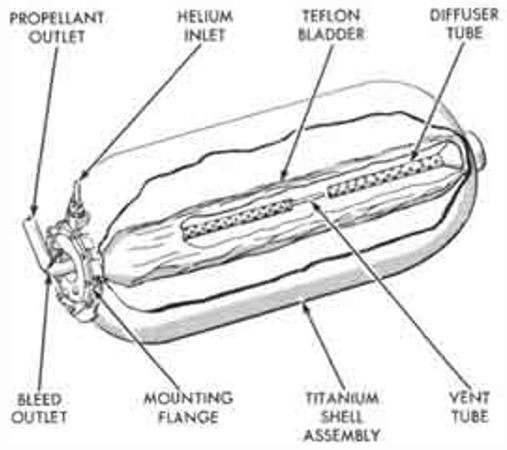
Рис. 2 Схема одного з чотирьох баків місячного модулю програми Аполлон
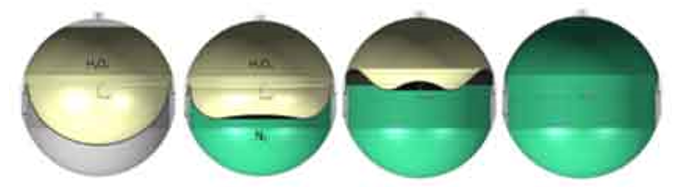
Рис. 3 Деформація діафрагми підчас опорожнення сферичного баку [1]
Сучасні місії тяготіють до використання систем контролю палива на основі сил поверхневого натягу, що можуть бути легшими та більш надійними ніж механічні системи. Хоча діафрагми залишаються ефективними при підтриманні палива чистим від газової фази і демпфуванню плескання компонентів палива [13] в середині баку. Наприклад ті ж Шаттли використовували три баки з діафрагмами [5], або ж Кассіні [9].
Інерційні системи управління паливом
Інерційні системи здебільшого використовуються на ступенях ракет. При відділенні відпрацьованого ступеня ракета перед запуском ДУ наступної ступені перебуває в стані вільного падіння тому для забезпечення пуску двигуна необхідно осадити компоненти палива. Для цього використовують так звані двигуни малої тяги (рис. 4). Ними проводиться осьовий імпульс і паливо в баках осідає виштовхуючи газову фазу перед пуском двигунів.

Рис. 4 Двигуни для осадження палива другого ступеня ракети Сатурн V. [7]
Також теоретично можливо використовувати відцентрові сили для осадження палива в баках, але досі жодна з подібних систем не використовували такий ефект на практиці, що обумовлюється в необов`язковій складності конструкції яка повинна обертатись навколо КЛА, або ж обертатись цілком в польоті. Такі навантаження неминуче призведуть до необхідного зміцнення конструкції в цілому що приведе до збільшення ваги КЛА.
Такі системи дуже прості і тому насамперед їх можна побачити на перших ракетах ще у 60-х роках 20-ого сторіччя. Наприклад на американському Сатурн-V на другому ступені було встановлено 8 двигунів орієнтації що також використовували для осадження палива [16]. Схожу систему, коли двигуни орієнтації виконували функцію осадження палива, використовували й у програмі Аполлон і на місячному модулі [14]. Також таку систему використовують й досі на російських ракетах Протон, хоча й такі двигуни мають схильність вибухати багато років після виконаних місій прямо на орбіті. На даний момент зареєстровано 54 вибухи таких двигунів на вже відпрацьованих ступенях [18].
Такі системи є досить надійними, та відносно легкими, бо функцію з осадження палива виконують маневрові двигуни які обов’язкові для КЛА. Але кінцева кількість палива обмежує кількість запусків. На додачу двигуни інерційних систем також можна використовувати для зведення відпрацьованих КЛА з орбіти [15].
Системи управління паливом поверхневого натягу
Системи управління паливом що працюють на основі сил поверхневого натягу використовують схильність рідини до найменшої площі поверхні. Такі системи зазвичай складаються з сітчастих екранів, капілярних пасток та направляючих. Ці системи добре працюють як з висококиплячими компонентами палива так із кріогенними. Ці системи можуть проектуватися з відносно малою питомою масою [11].
Зазвичай їх підрозділяють за ступенем повноти контролю, а саме:
• часткові;
• тотального контролю.
Але сьогодні на практиці такі системи мають елементи присутні обом категоріям.
Системи часткового управління паливом на основі поверхневого натягу утримують необхідну частину палива, вільну від газової фази в магістралі та біля неї аби реактивному рушію вистачило запуститися та осадити все паливо в баках. Після того як паливо осідає, такі губчасті пастки заповнюються наново. Через декілька десятків циклів пасивних ділянок траєкторії та пусків двигуна є ризик забиття капілярів бульбашками газової фази, що збільшує опір відтоку компонентів, та зменшує об’єм палива що захоплюється пасткою.
На теперішній час системи поверхневого натягу використовують як пастки так і направляючі, і екрани. Ці системи дозволяють у пасивному режимі перенаповнювати пастки компонентами палива та водночас гарантують більшу пропускну здатність, а ніж системи часткового контролю, що базуються тільки на роботі пасток. Також із-за того що майже все паливо контролюється такою системою пастка може бути зменшена, або навіть майже відсутня. Але із-за того що системи тотального контролю повинні втримувати на собі все паливо баку і повинні бути виконані з металу це збільшує вагу КЛА та зменшує їх ефективність при роботі з малими прискореннями. Як показують останні досягнення, такі системи можуть бути ультра легкими (до 100гр), але при цьому така системи лише може забезпечити витрату – 0.005 л/с, яка також є ультра малою [8].
Рис. 5 Система тотального контролю з направляючими та капілярною губкою з 10% залишком палива. [10]
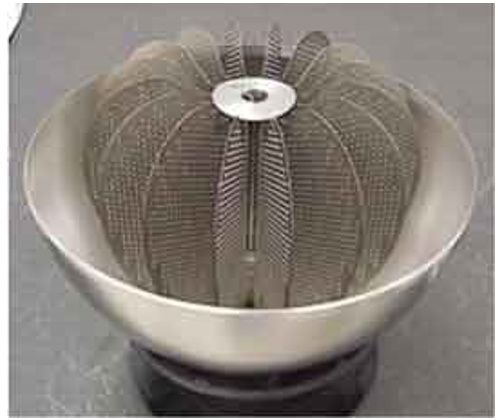
Рис. 6 Система тотального контролю палива на основі сітчастих екранів [11].
Електростатичні системи управління паливом
Електростатичні системи контролю палива використовують електричні поля для збирання палива біля вихідного отвору з баку. Такі системи не були застосовані на практиці і розглядалися лише теоретично, бо потребують джерел високої напруги на борту КЛА [2].
Запропоновані конструкції зазвичай складаються з баку довільної форми та стрижня що проходить в середині баку від верхньої частини до вихідного отвору баку. Прикладаючи протилежний потенціал до кінців стрижня можна змусити рухатися рідину з одного кінця стрижня до іншого.
Ще одна причина відмови від таких пристроїв їх ймовірна пожежонебезпека. Висока напруга може вивільнитись дуговим розрядом що може спричинити спалахування пального. Дуговий розряд також може спричинити розкладання деяких складних компонентів палива таких як пероксид водню, який на сьогоднішній час розглядається як перспективний [12]. Хоча в таких реакціях електролізу зазвичай головну роль виконує сила току, тому електроліз компонентів найменш вірогідний [3].
Також із-за того що не всі молекули компонентів палива мають диполь і функцію втримання в таких компонентах виконують йони такі системи мають різну ефективність для різних палив.
Висновки
Системи управління паливом що базуються на ефекті поверхневого натягу, є найпоширенішими завдяки своїй надійності та величезній експериментальній базі. Цей тип систем використовує перегородки, плавники, лопатки та капілярні сітки. Але такі додаткові конструкції ускладнюють проектування, виготовлення та випробування паливних баків. ЗП такого типу також порушують потік палива під час роботи двигуна і мають кінцеву кількість запусків в умовах низької гравітації через закупорювання бульбашками. Такі пристрої не працюють у високих ретроградних полях тяготіння, через їх малу теоретичну ефективність капілярних сил або мають складну структуру.
Тимчасове збільшення утримуючої сили в капілярній сітці може збільшити потенційну кількість запусків в полі низької гравітації і навіть, в теорії, може допомогти при закупорюванні бульбашками капілярної сітки, що може бути необхідним і життєво важливим для міжпланетних комплексів постачання багаторазового використання. Крім того, це може збільшити коефіцієнт безпеки для таких систем, виготовлення, складання, випробування та зменшити витрачений час на проектування за рахунок зменшення кількості деталей та можливості випробувань у гравітаційному полі Землі.
Необхідно розглянути потенційну можливість збільшення утримуючої сили завдяки електричному полю, так як збільшення утримуючої сили лише приведе до порушення потоку та ускладнює спорожнення паливних баків.
Такий тип систем може використовуватися не тільки для управління паливом, але також для систем життєзабезпечення, догляду за життям, технологій виробництва в умовах низької гравітації та навіть на Землі в системах подачі рідини без традиційних насосів.
Посилання
- [Деформація діафрагми підчас опорожнення сферичного баку]. Nammo. URL: https://www.nammo.com/product/aluminium-propellant-tank/ (date of access: 22.05.2023).
- Научно-технический отчет о НИР. Книга 2. Дніпропетровськ : КБ “Южное”, 1989.
- Шамб У., Вентворс Р., Сеттерфилд Ч. Перекись водорода : монографія / ред. А. И. Горбанев ; пер. з англ. Г. Д. Вигдорович. Москва : Изд-во иностр. лит, 1958. 578 с.
- A survey of current developments in surface tension devices for propellant acquisition / S. C. De Brock et al. Journal of Spacecraft and Rockets. 1971. Vol. 8, no. 2. P. 83–98. URL: https://doi.org/10.2514/3.30226 (date of access: 22.05.2023).
- Ballinger I., Lay W., Tam W. Review and history of PSI elastomeric diaphragm tanks. 31st joint propulsion conference and exhibit, San Diego, CA, U.S.A. Reston, Virginia, 1995. URL: https://doi.org/10.2514/6.1995-2534 (date of access: 22.05.2023).
- Biron J. An aluminum collapsible bladder tank for space systems. 26th Joint Propulsion Conference, Orlando, FL, U.S.A. Reston, Virginia, 1990. URL: https://doi.org/10.2514/6.1990-2058 (date of access: 22.05.2023).
- Contributors to Wikimedia projects. Ullage motor – Wikipedia, 2004. Wikipedia, the free encyclopedia. URL: https://en.wikipedia.org/wiki/Ullage_motor (date of access: 22.05.2023).
- Design and fabrication of a propellant management device / W. Tam et al. 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & exhibit, Indianapolis, Indiana, 2–10 July 2002. Reston, Virigina, 2002. URL: https://doi.org/10.2514/6.2002-4137 (date of access: 22.05.2023).
- Enright P., Wong E. Propellant slosh models for the Cassini spacecraft. Astrodynamics conference, Scottsdale, AZ, U.S.A. Reston, Virigina, 1994. URL: https://doi.org/10.2514/6.1994-3730 (date of access: 22.05.2023).
- Fluid acquisition and resupply experiments on space shuttle flights STS-53 and STS-57 / S. Dominick et al. MSFC, Alabama : NASA, 2011. 60 p.
- Hartwig J. W. Propellant management devices for low-gravity fluid management: past, present, and future applications. Journal of Spacecraft and Rockets. 2017. Vol. 54, no. 4. P. 808–824. URL: https://doi.org/10.2514/1.a33750 (date of access: 22.05.2023).
- Hydrogen peroxide – A promising oxidizer for rocket propulsion and its application in solid rocket propellants / W. Kopacz et al. FirePhysChem. 2022. Vol. 2, no. 1. P. 56–66. URL: https://doi.org/10.1016/j.fpc.2022.03.009 (date of access: 22.05.2023).
- Lenahen B., Gangadharan S., Desai M. A computational and experimental analysis of spacecraft propellant tanks implemented with flexible diaphragms. 54th AIAA/ASME/ASCE/AHS/ASC Structures, structural dynamics, and materials conference, Boston, Massachusetts. Reston, Virginia, 2013. URL: https://doi.org/10.2514/6.2013-1886 (date of access: 22.05.2023).
- McCutcheon K. D. Rocket propulsion evolution: 9.45 – LM RCS. AEHS Home. URL: https://www.enginehistory.org/Rockets/RPE09.45/RPE09.45.shtml.
- Okninski A. Solid rocket propulsion technology for de-orbiting spacecraft. Chinese journal of aeronautics. 2022. Vol. 35, no. 3. P. 128–154. URL: https://doi.org/10.1016/j.cja.2021.07.038 (date of access: 22.05.2023).
- Photos of rocket upper stages | historic spacecraft. Historic Spacecraft – Photos of Rockets and Spacecraft. URL: https://historicspacecraft.com/Rockets_Upper_Stage.html.
- Schmer T. [Combined propellant/pressurant vessel (CPPV) concept], 2019. SteelHead Composites. URL: https://steelheadcomposites.com/combined-propellant-pressurant-vessel-cppv-concept/.
- Wall M. Old Russian rocket motor breaks up in orbit, generating new cloud of space debris. Space.com. URL: https://www.space.com/russian-rocket-motor-breakup-space-debris (date of access: 22.05.2023).