Про доцільність застосування суборбітальних ракет-носіїв для відведення космічних об’єктів з низьких навколоземних орбіт
Владислав Аркадійович Пророка
Дніпровський національний університет імені Олеся Гончара, Дніпро
Микола Михайлович Дронь
Дніпровський національний університет імені Олеся Гончара, Дніпро
Анатолій Олександрович Абатуров
Дніпровський національний університет імені Олеся Гончара, Дніпро
Зростання кількості нефункціонуючих космічних об’єктів, що знаходяться на низьких та середніх орбітах все більш гостро ставить задачу їх відведення у щільні шари атмосфери з метою запобігання ситуацій їх зіткнення між собою та зростання засміченості цих ділянок навколоземного простору. Останніми роками запропоновано велику кількість засобів відведення (систем уводу) об’єктів космічного сміття (ОКС) [1]. Майже всі запропоновані рішення передбачають виведення таких пристроїв на орбіти з параметрами близькими до параметрів орбіти ОКС, з подальшим зближенням засобу відведення та об’єкту, що необхідно відвести. Деякі пристрої здатні відвести лише один крупногабаритний об’єкт космічного сміття, інші виконують операції переходу між орбітами, на яких знаходяться ОКС з метою захоплення декількох таких об’єктів.
У порівнянні із запропонованими на даний момент рішеннями, перспективним виглядає шлях виведення систем уводу об’єктів космічного сміття за допомогою ракет, що можуть рухатися за суборбітальними траєкторіями. До таких ракет можна віднести як існуючі суборбітальні ракети-носії (СРН) – ракети-зонди; метеорологічні, геофізичні ракети; ракети для космічного туризму тощо, так і деякі ракети військового призначення, що знімаються з озброєння та підлягають утилізації [2]. Дані ракети можуть забезпечити виведення системи уводу у ті самі точки навколоземного простору, що і ракети-носії. Однак такий спосіб має свої особливості.
Суборбітальні траєкторії у більшості випадків передбачають розгін корисного навантаження до швидкостей менших за першу космічну. Через це величина відцентрової сили, що напряму залежить від квадрату швидкості, виявляється недостатньою аби компенсувати гравітаційну силу та утримати об’єкт на орбіті. Така особливість створює як передумови для комплексного вирішення проблеми космічного сміття, так і нові задачі, що необхідно вирішити для реалізації уводу ОКС за допомогою суборбітальних ракет.
Типова траєкторія суборбітальної ракети передбачає наявність декількох основних ділянок. Висхідна ділянка траєкторії поділяється на активну, де відбувається політ під дією тяги рушійної установки та швидкість збільшується із часом, та пасивної, де ракета рухається за інерцією, отриманою на активній ділянці з поступовим зниженням швидкості. На низхідній ділянці відбувається вільне падіння ракети з поступовим наростанням швидкості на ділянках, де щільність атмосфери є малою.
Звернувшись до формули Ціолковського, поданої у класичному вигляді [3], зрозуміло, що зменшення кінцевої швидкості напряму веде до зменшення кількості палива, яку необхідно спалити для виведення корисного навантаження, що у свою чергу призводить до зменшення маси конструкцій баків або корпусів ракетних двигунів твердого палива (РДТП) і сумарно дозволяє у рази зменшувати як стартову масу ракети, так і вартість всього ракетного комплексу, що від неї залежить. Для того, аби проілюструвати наскільки суттєво меншою є твердопаливна суборбітальна ракета, необхідна для виведення системи відводу на деяку висоту у порівнянні з твердопаливною ракетою-носієм, що має виводити еквівалентний корисний вантаж на кругову орбіту з аналогічною висотою, слід звернутися до прикладу, що мав місце у історії ракетної техніки.
Найпотужнішою на даний момент суборбітальною ракетою є ракета-зонд Maxus [4]. Ця ракета використовується з 1992 року для проведення експериментів в умовах мікрогравітації і здатна виводити корисний вантаж масою близько 800 кг на висоту приблизно 700 км. Рушійною установкою одноступеневої Maxus є РДТП Castor 4B, який був успадкований від оперативно-тактичної ракети MGM-29 Sergeant та раніше використовувався на других ступенях сімейства ракет-носіїв Scout [5]. На початку 1980-х років компанія Space Services Inc. of America вирішила створити на базі РДТП Castor 4B сімейство твердопаливних орбітальних ракет-носіїв, яку назвали Conestoga [6] (див. Рис. 1). Перші ступені ракет-носіїв сімейства було побудовано за модульною схемою – вони представляли собою пакети зв’язаних між собою однакових РДТП Castor 4B.
Серед ракет сімейства (окрім першого тестового варіанту, що не входив у сімейство) лише Conestoga–1620 дійшла до етапу льотних випробувань, які були проведені у 1995 році. Однак льотні випробування виявилися невдалими і через деякий час компанія припинила свою діяльність.
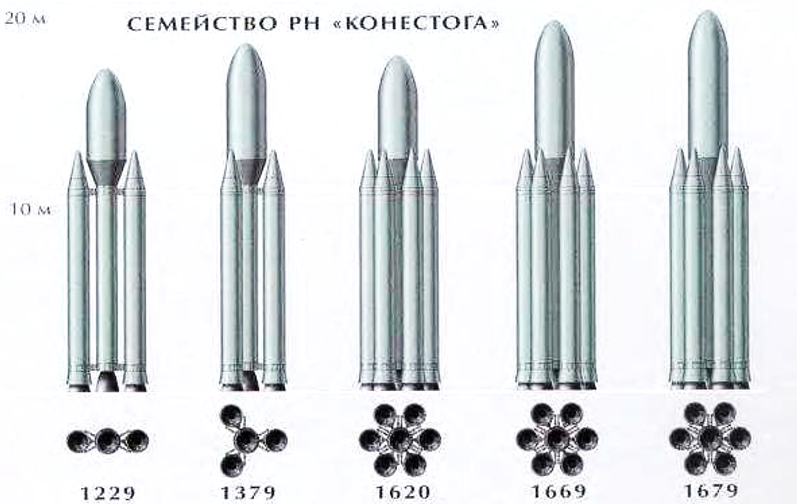
Рисунок 1 – Сімейство орбітальних ракет-носіїв Conestoga [6]
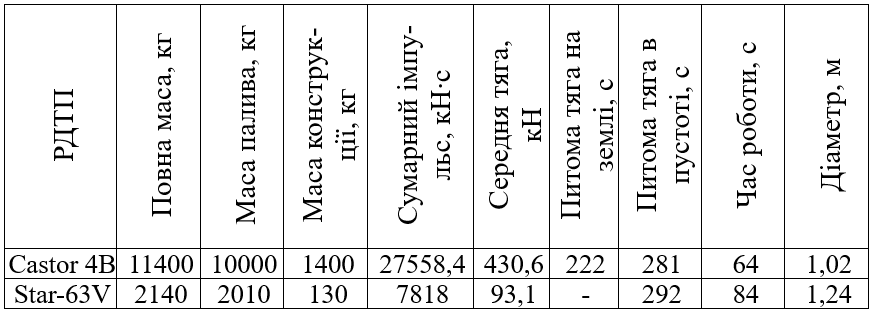
Відомо, що Conestoga–1620 могла виводити корисний вантаж масою 1179 кг на кругову орбіту з висотою 700 км. При цьому виведення відбувалося наступним чином: на першому ступені працювало 4 з 6 бокових прискорювачів ракети, що були розташовані навколо центрального блоку, на другому ступені працювали 2 прискорювачі, що залишилися, далі на третьому ступені працював останній Castor 4B з розширеним соплом, а на 4 ступені застосовувався твердопаливний двигун Star-63V. Основні характеристики двигунів, що застосовувалися на ракеті Conestoga–1620 показано у Таблиці 1.
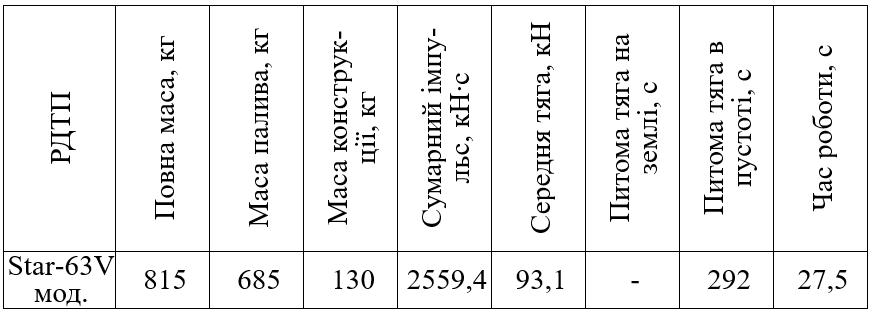
Для того, аби порівняння ракет Maxus та Conestoga–1620 стало більш коректним, приведемо масу корисного вантажу до одного значення. Для цього зменшимо значення запасу палива (і час роботи двигуна відповідно) на останньому ступені ракети Conestoga–1620. Скориставшись програмою DBallistic [7] для оцінки параметрів орбіти зміненої ракети Conestoga–1620, знайдемо методом послідовних наближень параметри зменшеного РДТП четвертого ступеня для висоти орбіти 700 км та корисного навантаження 800 кг за сталих параметрів тяги та сухої ваги РДТП, які подано у Таблиці 2.
У Таблиці 3 наведемо основні характеристики ракет Maxus та ракети Conestoga–1620 після проведеної модифікації.
Таблиця 1 – Основні характеристики двигунів ракети Conestoga 1620 [6]
Таблиця 2 – Характеристики четвертого ступеня після модифікації у DBallistic [5, 7]
Таблиця 3 – Порівняння основних характеристик ракет Maxus і Conestoga–1620 у модифікованому варіанті [4, 5, 7]
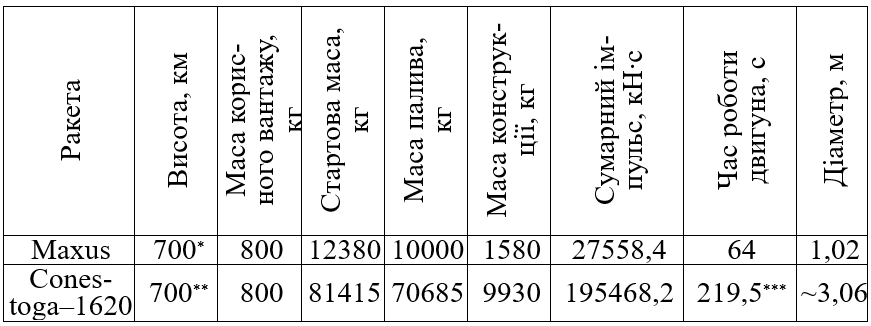
Примітки: * – апогею; ** – кругова орбіта; *** – сумарний для ракети.
Маємо наступні співвідношення між ракетою Conestoga–1620 та Maxus:
1. Відношення стартових мас:

2. Відношення мас палива:

3. Відношення мас конструкції:

4. Відношення сумарних імпульсів:

5. Відношення часу активних ділянок траєкторії:
Слід зауважити, що ракета Conestoga–1620 побудована за модульною схемою, яка не є оптимальною з точки зору мінімуму критеріїв, які було обрано для порівняння. Тобто для заданих параметрів корисного вантажу та висоти орбіти може існувати теоретична ракета з кращими характеристиками відносно Conestoga–1620, однак, вона потребуватиме створення більш потужних РДТП. Матеріальні та часові затрати на проєктування та відпрацювання таких РДТП у свою чергу значно збільшить загальну вартість реалізації проєкту. Тому таке питання потребує більш глибокого економічного аналізу з пошуком оптимального рішення.
Застосування суборбітальної ракети Maxus замість модифікованої версії ракети-носія Conestoga–1620 для теоретично можливого виведення системи уводу ОКС дозволяє зменшити вартість запуску системи уводу ОКС за рахунок:
1) зменшення кількості сумішевого палива, що є достатньо дороговартісним, приблизно у 7 разів;
2) зменшення маси конструкції, головним чином корпусів РДТП, що виготовляються із композиційних матеріалів високої вартості, більш ніж у 6 разів;
3) зменшення стартової маси ракети, що призводить до зменшення конструкцій стартового комплексу та обслуговуючого і транспортувального обладнання більш ніж у 6,5 разів;
4) зменшення кількості необхідних РДТП з 8 до 1, що крім зменшення вартості значно збільшує вірогідність виконання польотного завдання;
5) зменшення вартості за рахунок відсутності конструкцій, що скріплюють ракетні блоки у пакет та ступені між собою.
Окремо слід відзначити переваги, пов’язані з режимами польоту суборбітальних ракет. Більшість суборбітальних ракет мають траєкторію польоту близьку до вертикалі. Це дозволяє зменшити величину перерізуючих сил та згинальних моментів, що діють на ракету за наявності програми тангажа, що характерно для орбітальних ракет-носіїв. Зменшення навантажень веде до зменшення величини несучих конструкцій ракети. Окрім того, якщо брати до уваги ракети, що побудовані не за модульною схемою, критичним тут може бути питання збільшення часу роботи двигуна, що веде до ускладнення заходів забезпечення теплового захисту елементів ракетних двигунів. Менший час роботи двигунів суборбітальних ракет дозволяє значно спростити вирішення даної проблеми.
За рахунок того, що траєкторія суборбітальної ракети наближена до вертикалі, це дозволяє значно зменшити розміри зони відчуження необхідних для їх запуску у порівнянні з зонами можливого падіння відпрацьованих ракетних орбітальних ракет-носіїв. Для ракети Maxus зона відчуження у діаметрі не перевищує 80 км (див. Рис. 2) [4]. Це у свою чергу розширює перелік територій, з яких можливо здійснювати запуск СРН.

Рисунок 2 – Номінальна траєкторія польоту ракети Maxus [4]
Зупинимося на питанні багаторазовості використання конструкцій ракет. На тепер існує тенденція пошуку шляхів до реалізації такої ідеї для об’єктів ракетно-космічної техніки. Для орбітальних ракет-носіїв на сьогоднішній день іде мова лише про повернення перших ступенів, у той час як порятунок та повторне використання верхніх ступенів залишається практично нереалізованим завданням. Це пов’язано з високою швидкістю з якою дані ступені обертаються на орбіті, тому сходження з орбіти потребує значних енергетичних затрат на видачу гальмівного імпульсу достатнього для того, щоби при спуску у земну атмосферу ступінь не зруйнувалася від різного роду навантажень. У той же час, найбільш дороговартісними вузлами, які можна було б використовувати повторно для ракет залишаються двигуни та апаратні відсіки, у яких зосереджені високоточні прилади систем керування – бортові комп’ютери, датчики системи орієнтації тощо. Майже завжди апаратні відсіки знаходяться саме на верхніх ступенях ракет. Для суборбітальних ракет така проблема стоїть менш гостро, так як швидкості, з якими рухається СРН при досягненні апогею на є на декілька порядків меншими за швидкість об’єктів, що утримуються на орбіті. Тому реалізувати багаторазовість використання усієї конструкції СРН можна значно простіше. Проте, на низхідній ділянці траєкторії ракета перебуває у вільному падінні, тому для її безпечного повернення необхідно реалізовувати заходи по зменшенню швидкості з якою вона знижується. Для цього на суборбітальних ракетах встановлюють системи порятунку, що можуть представляти собою одноступеневі та багатоступеневі парашути, елементи, що при розкладанні збільшують аеродинамічний опір за рахунок збільшення площі міделя, двигуни гальмування та інші типи систем порятунку.
Поруч із усіма перевагами виведення систем уводу ОКС з навколоземних орбіт за допомогою СРН, слід звернути увагу на нові задачі, які не вирішувалися дотепер жодною із систем, що працюють чи працювали у навколоземному просторі.
Припустимо, що існує деяка точка навколоземного простору, через яку проходять орбітальна траєкторія ОКС та траєкторія СРН, що містить на борту систему уводу цього ОКС. Швидкість ОКС складає не менше 7 км/с, у той час як СРН може рухатися зі швидкістю одиниць, десятків або у кращому разі сотень метрів на секунду. До того ж, вектор швидкості СРН явно не буде збігатися з вектором швидкості ОКС, що має напрям по дотичній до орбіти.
Першою задачею, яку не обхідно вирішити для реалізації запропонованої ідеї є вибір та аналіз взаємодії двох об’єктів, що рухаються зі швидкостями, які відрізняються на 2-3 порядки. Просте зіткнення між такими об’єктами може призвести до утворення хмари уламків, що перебуватимуть на навколоземній орбіті значний час через недостатню для сходу з орбіти зміну швидкості. Негативним прикладом, що ілюструє актуальність вирішення цієї задачі є випробування засобів боротьби з космічними апаратами, що використовуються у військових цілях [8], при яких утворювалися уламки, що могли загрожувати функціонуванню у тому числі Міжнародної космічної станції.
Другою задачею є забезпечення точності виведення системи уводу у місце зустрічі з ОКС. Причому точність як по координатам, так і по часу зустрічі. Окрім значної різниці у швидкості між об’єктами, складність полягає у тому, що значна частина траєкторії СРН є пасивною ділянкою, яка до того ж проходить на висотах з дуже розрідженою атмосферою, де її вплив практично не відчутний. Тому у цій ситуації важко знайти альтернативу деякому двигуну, що видаватиме коригуючі імпульси на фінальному відтинку при підльоті до точки зустрічі з ОКС. Для того аби звести коригуючі імпульси на фінальному відтинку до мінімуму, а значить зменшити розміри двигуна корекції та запас робочого тіла для видачі імпульсу, необхідно мінімізувати будь-які збурення, що можуть відхилити траєкторію руху СРН від номінальної. Тобто, необхідно вирішити задачу мінімізації розсіювання траєкторних параметрів на активній ділянці польоту СРН як тіла змінної маси та на пасивній ділянці, де рух ракети мало чим відрізняється від руху артилерійського снаряда, що рухається по балістичній траєкторії. Зрозуміло, що достатня точність виведення може бути забезпечена лише за наявності відповідної точності системи керування та орієнтації СРН, що є окремою непростою для практичної реалізації задачею.
Посилання
- An overview of methods and technical means of space debris removal from low earth orbits / А. O. Аbaturov et al. System design and analysis of aerospace technique characteristics. 2022. Vol. 31, no. 2. P. 3–13. URL: https://doi.org/10.15421/472209 (date of access: 26.05.2023).
- Noga T. Suborbital rockets in safety & defense applications. Safety & defense. 2021. Vol. 7, no. 2. P. 65–79. URL: https://doi.org/10.37105/sd.146 (date of access: 26.05.2023).
- Проектування і конструкція ракет-носіїв: Підручник/ В. В. Близниченко, Є. О. Джур, Р. Д. Краснікова, Л. Д. Кучма, А. К. Линник та ін.; за ред. акад. С. М. Конюхова. – Д: Вид-во ДНУ, 2007. – 504 с.
- Maxus-8 : Information kit. 2010. URL: https://www.dlr.de/rd/Portaldata/1/Resources/portal_news/newsarchiv2010_2/MAXUS_Information.pdf (date of access: 26.05.2023).
- Castor motor series. propulsion products catalog. ©Northrop Grumman. Approved for Public Release OSR No. 16-S-1432, 2016. URL: https://www.northropgrumman.com/wp-content/uploads/CASTOR-Motor-Series.pdf (date of access: 26.05.2023).
- Krebs, Gunter D. “Conestoga-1620”. Gunter’s space page. URL: https://space.skyrocket.de/doc_lau_det/conestoga-1620.htm (date of access: 26.05.2023).
- DBallistic version 1.0.7.0s. Dnipro, 2004.
- A Russian anti-satellite missile test puts the ISS in peril. The economist. 2021. 18 November. URL: https://www.spacecom.mil/Newsroom/News/Article-Display/Article/2842957/russian-direct-ascent-anti-satellite-missile-test-creates-significant-long-last/ (date of access: 26.05.2023).