Автоматизований пристрій розвантаження бункера з сипучими матеріалами
Наталія Сергіївна Ащепкова
Дніпровський національний університет імені Олеся Гончара, Дніпро
Євгеній Олександрович Мачковський
Дніпровський національний університет імені Олеся Гончара, Дніпро
Вступ. Процес розвантаження бункерів або вагонів з сипучими матеріалами зазвичай здійснюється за допомогою пневматичних пристроїв. Для використання в цеху промислові установки громіздкі, або не захищені від розсіювання матеріалу і утворення пилу. Таким чином, розробка власної конструкції пристрою для розвантаження бункера з сипучими матеріалами є актуальною задачею.
Мета та задачі. Метою дослідження є розробка автоматизованого пристрою розвантаження бункера з сипучими матеріалами. Для досягнення поставленої мети потрібно розв’язати наступні задачі:
- Провести аналіз існуючого обладнання для розвантаження сипучих матеріалів.
- Здійснити обґрунтований вибір конструкції пристрою для розвантаження сипучих матеріалів.
- Скласти функціональну схему системи керування пристрою для розвантаження сипучих матеріалів.
Матеріали і методи. Процес створення автоматизованого пристрою розвантаження бункеру з сипучими матеріалами здійснимо на основі аналізу існуючого сучасного обладнання. Після обґрунтованого вибору конструкції визначимо функціональну схему системи керування для подальшого детального опрацювання кожного елементу запропонованого автоматизованого пристрою розвантаження бункеру.
Результати. Для створення нової конструкції пристрою розвантаження бункера з сипучими матеріалами проаналізуємо конструкції аналогічних пристроїв.
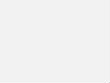
Комплект устаткування для розвантаження навального цементу (або будь-яких сипучих вантажів) з вагонів-хоперів та його подальшої перевалки (рис.1) в автоцементовози складається з лотка підкатного ЛШ-125.01 для розвантаження цементу з вагонів й живильника похилого пересувного ПНП-250 для завантаження автоцементовозів (конструкцією передбачено регулювання для кожного розміру автоцементовозів).
Застосування устаткування не потребує організації бункера в підрейковому просторі, і, відповідно, не потребує узгодження з залізницею. Устаткування мобільно и може використовуватись на любій площадці з щільним покриттям, без попередньої підготовки. Час розгортання після доставки 30 – 40 хв. Продуктивність (по цементу) – до 40 т/год. Сумарна споживана потужність – 17 кВт. Виробник: Україна, Одеса, A.S., OOO Proektno-proizvodstvennaya firma.
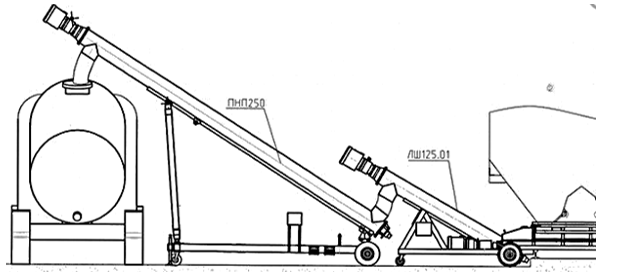
Рисунок 1. Комплект устаткування для розвантаження навального цементу з вагонів-хоперів та його подальшої перевалки
Установка для розвантаження сипучих матеріалів В-283-031 (рис.2) призначена для розвантаження навальних сипучих матеріалів (цементу) з нижніх люків вагона-хопера (при можливості облаштування проміжного развнтажувального бункеру в підрейковому просторі) та подачі матеріалу в прирейкові склади й цементовози (рис. 2.).
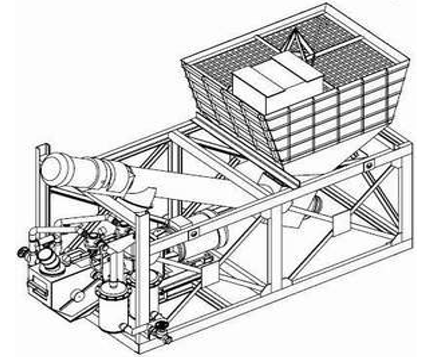
Рисунок 2. Установка для розвантаження
сипучих матеріалів В-283-031
Установка для розвантаження сипучих матеріалів В-283-031сскладається з приймального бункера, в який вивантажується сипучій матеріал; живильника, для проміжного зберігання матеріалу; пневматичного гвинтового підйомника, за допомогою якого матеріал переміщується; системи підготовки повітря (волого- та мастило віддільники, редукційні клапани і т.п.); пульта управління; трубопроводу.
Пневматичний гвинтовий підйомник СБ-245 здійснює подачу сипучого матеріалу в прирейкові склади або витратні бункера розташовані не далі 50 м по горизонталі від місця розвантаження вагону (при максимальній висоті підйому 35 м). Продуктивність – не більше 30 м3/год. Сумарна споживана потужність електродвигунів – 27,5 кВт. Виробник: Україна, Донецька область, Слов’янськ, ПАТ “Бетонмаш” (Betonmash, PAO).
Жодна з наведених конструкцій не може бути застосована, оскільки установки громіздкі (рис. 1, 2), та не захищені від розсіювання матеріалу і утворення пилу. Таким чином, виникає необхідність проектування власної конструкції устаткування розвантаження сипучих матеріалів.
Аналіз патентної документації [1 – 6] також доводить, що процес розвантаження бункерів або вагонів з сипучими матеріалами зазвичай здійснюється за допомогою пневматичних пристроїв.
Автори пропонують конструкцію автоматизованого пристрою для розвантаження бункера з сипучім матеріалом (рис.3).
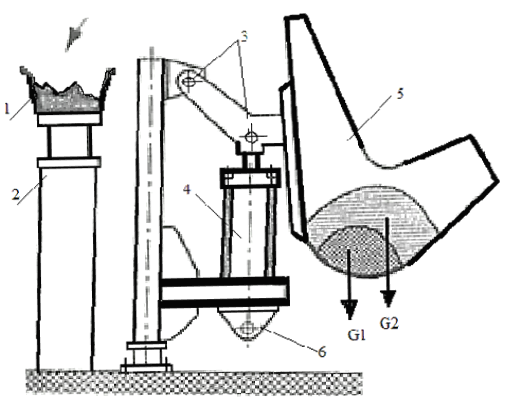
Рисунок 3. Автоматизований пристрій розвантаження бункеру з сипучім матеріалом
Принцип роботи запропонованого пристрою: матеріал з поворотного бункера 5 висипається у лоток 1, вздовж якого транспортується за допомогою прямолінійної вібраційної системи 2. Модуль повороту складається з важеля, пневматичного циліндру 4, поворотного бункера 5, поворотного фланцю 6. У шарнірах важеля модуля повороту встановлено датчики зусилля зрізу пальців 3, за допомогою яких можна визначити масу матеріла в бункері.
Функціональна схема системи керування для запропонованого пристрою для розвантаження бункера з сипучім матеріалом наведена на рис.4.
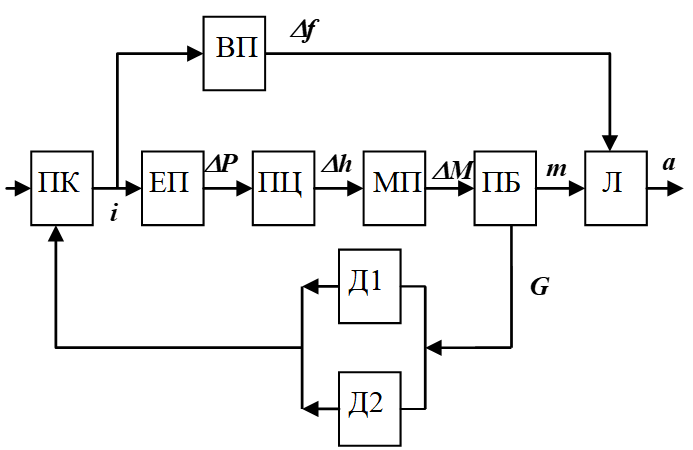
Рисунок 4. Функціональна схема системи керування автоматизованого пристрою для розвантаження бункера з сипучім матеріалом
За функціональною схемою можна визначити принцип роботи ланцюгів керування та послідовність перетворення сигналів. Пристрій керування ПК по сигналу оператора генерує струм i,який електричним перетворювачем ЕП перетворюється в різницю тисків (рушійний тиск) DP. Різниця тисків у порожнинах пневмоцилiндру ПЦ спричиняє переміщення штоку Dh, який взаємодіє з модулем повороту МП та створює перекидаючий момент DM. Момент DM діє навколо вісі обертання поворотного бункера ПБ та обумовлює дозоване висипання матеріалу масою m влоток Л. Під впливом керуючого струму i, вібраційний привод ВП генерує коливання з частотою Df, які обумовлюють переміщення сипучого матеріалу масою m полотку Л з прискоренням a.
Наявність матеріалу в бункері контролюється двома датчиками Д1 та Д2, розташованими відповідно під склепінням та на днищі поворотного бункера ПБ. Сипучім матеріалам властиво скупчення та нарощування шарів на стінках та під склепінням бункерів, тому якщо хоча б один датчик Д1 або Д2 показує наявність матеріалу, система працює. Якщо сигнал від обох датчиків відсутній, система вимикається.
Висновки. При розвантаженні бункерів або вагонів з сипучими матеріалами зазвичай застосовуються пневматичні пристрої. Існуючі промислові установки громіздкі та не захищені від розсіювання матеріалу і утворення пилу. Авторами було проаналізовано існуюче промислове обладнання для розвантаження бункерів з сипучими матеріалами, проведено аналіз патентів та запропонована власна конструкція. Для запропонованої конструкції автоматизованого пристроюю для розвантаження бункерів з сипучими матеріалами розроблено функціональну схема системи керування. В подальшому буде розроблено електричну принципову та пневматична схеми пристрою розвантаження бункера з сипучими матеріалами. Для забезпечення транспортування сипучого матеріалу заплановано доповнити запропонований автоматизований пристрій розвантаження бункеру вібраційним транспортером.
Посилання
- Камерний живильник нагнітальній пневмотранспортної установки : пат. UA 2190569/С2 : B 65 G 65/34. № 2731452/13 ; заявл. 30.08.2000 ; опубл. 10.10.2002, Бюл. № 10. 6 с.
- Arrangement for unloading loose materials : patent RU 2013336 : B 65 G 65/34. No. 4931452/13 ; applied on 29.04.1991 ; published on 30.05.1994. 5 p.
- CHAMBER FEEDER OF PNEUMATIC TRANSPORTATION PLANT : patent RU 2255889 : B 65 G 53/40. No. 003120339/11 ; applied on 02.07.2003 ; published on 10.07.2006, Bulletin no. 19. 8 p.
- Feeder for pressure pneumatic transport plant : patent RU 2261214. No. 003123474/11 ; applied on 23.07.2003 ; published on 27.09.2006, Bulletin no. 27. 6 p.