Автоматизовані стенди для випробування електромеханічних приводів робототехнічних систем
Володимир Степанович Дудніков
Дніпровський національний університет імені Олеся Гончара, Дніпро
У робототехнічних системах широко використовуються електромеханічні приводи поступального та обертального рухів. У приводах поступального переміщення найчастіше використовуються гвинтові передачі як з тертям ковзання, так і з тертям кочення [1, 2]. Усі приводи при їх відпрацюванні, перед тим як бути встановленими до складу робототехнічної системи, піддаються випробуванням на працездатність, зокрема, на довговічність за критерієм зношування, на спеціально розроблених стендах [3].
Відомі стенди для проведення статичних або малорухливих випробувань гвинтових передач [4, c.186 – 187, рис. 92а]. У найбільш простій конструкції стенда передача своєю веденою ланкою через динамометр з’єднується з основою, а навантаження на ведучий ланці створюється тарованим вантажем, утворюючим пару сил. Навантаження змінюється дискретно, не можна здійснювати програмне навантаження у часі. Для проведення динамічних (під дією навантаження) випробувань гвинтова передача отримує рушійний обертаючий момент і своєю вихідною ланкою з’єднуєтеся з навантажувачем [4, с. 190 – 191, рис. 95]. Навантажувач зазвичай виконують пружинним, пневматичним, гідравлічним. Однак пружинний навантажувач не забезпечує сталість випробного навантаження, при великих навантаженнях і ходах випробовуваної передачі він виходить дуже громіздким. Не забезпечується програмне навантаження у часі. Пружинний навантажувач небезпечний в експлуатації, наприклад при аварійному розриві вихідної ланки випробовуваної передачі. Неможливо реверсувати навантаження, внаслідок чого випробовувана передача буде працювати тільки однією бічною поверхнею нарізі.
Пневматичний або гідравлічний навантажувач для створення великих зусиль вимагає великих тисків робочого середовища (відповідно повітря і рідини), що ускладнює їх конструкцію, експлуатацію, збільшує розміри. Також є джерелами підвищеної небезпеки при аварійному розриві вихідної ланки випробовуваної передачі. Утруднено реверсування випробувального зусилля.
Відомий стенд для випробування гвинтових передач [5]. Стенд містить основу, на якій закріплені випробуваний гвинтовий механізм і навантажувальний пристрій. Навантажувальний пристрій виконано у вигляді електромагніту постійного струму, сердечник якого встановлений з можливістю переміщення разом з гайкою випробовуваної гвинтової передачі, і пружини розтягування, пов’язаної також з гайкою та основою. Стверджується, що при цьому створюється постійне за величиною навантаження. Це навантаження складається з зусилля розтягнутої пружини і електромагнітної сили, яка прагне втягнути сердечник назад в обмотку електромагніту.
Недоліком відомого стенда є його індивідуальність (для кожної гвинтової передачі потрібні свої за характеристиками пружини розтягування та електромагніт), випробувальне навантаження залишається постійним тільки на деякій обмеженій ділянці робочого ходу гвинтової передачі, незначна величина випробувального навантаження, неможливість реверсування (зміна напрямку) випробувального навантаження, що не дає можливості навантажувати другу робочу сторону профілю нарізі.
Була поставлена задача забезпечення універсальності випробувального стенда, що дозволяє випробувати різноманітні гвинтові механізми, з великим діапазоном осьових навантажень, з постійністю навантажень на всьому робочому ході механізмів, з можливістю програмної зміни навантаження, а також реверсування навантаження. Поставлена задача вирішується тим, що у відомому стенді для випробування гвинтових механізмів, що включає основу, на якій закріплені випробовуваний гвинтовий механізм і навантажувальний пристрій, згідно з корисною моделлю, навантажувальний пристрій виконано у вигляді несамогальмівної передачі гвинт-гайка, гвинт якої жорстко з’єднаний з штоком випробовуваного механізму, що поступально переміщується, а гайка, яка встановлена на основі з можливістю обертання, за допомогою зубчастого мультиплікатора з’єднана з гальмом обертального руху, наприклад з керованим електромагнітним порошковим гальмом.
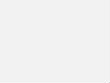
Між штоком випробовуваного механізму та гвинтом несамогальмівної передачі гвинт-гайка встановлено реверсивний силовимірювальний пристрій, а на гвинті несамогальмівної передачі виконаний поздовжній паз під направляючу шпонку, закріплену на основі. Суть технічного рішення пояснюється кресленням (рис. 1), на якому пропонований стенд зображений схематично. Стенд включає основу 1, на якій закріплені випробовуваний електропривод поступального переміщення на основі гвинтового механізму 2, і навантажувальний пристрій 3. Електропривід 2 містить електродвигун 4, з’єднаний з ним гвинт 5, що обертається, гайку 6, закріплену в штоку 7, що може поступально переміщатися по направляючій шпонці 8 відносно корпусу 9. Переміщення штока 7 обмежується двома кінцевими вимикачами 10, 11. Між приводом 2 і навантажувальним пристроєм 3 встановлено реверсивний силовимірювальний пристрій 12.
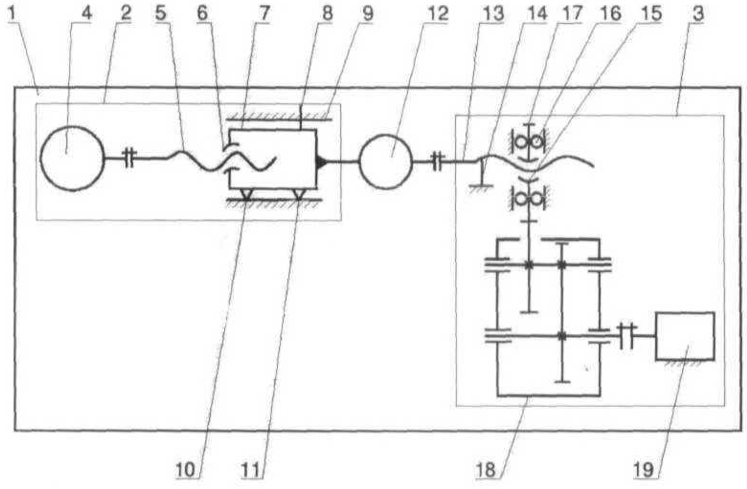
Рисунок 1 – Схематичне зображення стенду
Навантажувальний пристрій 3 містить несамогальмівну передачу гвинт-гайка, наприклад тертя кочення або багатозахідну передачу тертя ковзання, гвинт 13 який жорстко з’єднаний з пристроєм 12. На гвинті 13 виконано поздовжній паз під направляючу шпонку 14, закріплену на основі 1. Гайка 15 несамогальмівної передачі закріплена на основі 1 з можливістю обертання в підшипниках 16. На гайці 15 розміщується зубчастий вінець 17, що зачіпляється із зубчастим колесом зубчастого мультиплікатора 18. Зубчастий мультиплікатор 18 за допомогою муфти з’єднаний з електромагнітним порошковим гальмом 19. Зубчастий мультиплікатор 18 може бути виконаний багатоступеневим або у вигляді коробки передач для зміни передавального відношення.
Стенд працює таким чином. При включенні електродвигуна 4 починає обертатися вал 5. У зачепленні з гайкою 6 обертальний рух перетворюється в поступальне переміщення штока 7 відносно корпусу 9. Поступальне переміщення штока 7 через силовимірювальний пристрій 12 передається гвинту 13 несамогальмівної передачі гвинт-гайка. Поступальне переміщення гвинта 13 перетворюється в обертальний рух гайки 15, встановленої в підшипниках 16. Обертання гайки 15 за допомогою зубчастого вінця 17 передається зубчастому мультиплікатору 18, а від нього порошковому гальму 19. При вимкненому гальмі 19 гвинт 5 і гайка 6 навантажені невеликим осьовим зусиллям, що визначене величиною залишкового моменту тертя в гальмі і втратами в рухомих з’єднаннях кінематичного ланцюга стенда.
При включенні гальма 19, керуючи величиною поданої напруги живлення, можна регулювати величину створюваного моменту тертя в гальмі, а, отже, і величину осьового зусилля в випробувальному механізмі. Величина випробувального осьового зусилля фіксується силовимірювальним пристроєм 12. При досягненні штоком 7 своїх гранично допустимих положень спрацьовують кінцеві вимикачі 10, 11, які подають сигнал на зупинку двигуна 4 та його реверсування. При реверсуванні двигуна 4 відбувається реверсування напрямку переміщення гвинта 13, обертання гайки 15, мультиплікатора 18, гальма 19. Зміна напрямку обертання ротора гальма не призводить до зміни величини створюваного гальмівного моменту. Момент тертя між гайкою 15 і гвинтом 13 сприймається шпонкою 14 і замикається на основу 1.
У пропонованому стенді випробувальне навантаження створюється ходом самого механізму, що випробовується. Якщо він не працює, то навантаження на нього відсутнє. Це забезпечує безпеку експлуатації стенда. Так, наприклад, при розриві валу механізму, що випробовується, елементи навантажувача не отримують поступальних переміщень, а навантаження відразу ж обнуляється. Повністю виключається можливість надмірного, аварійного, зростання випробного навантаження при виході з ладу порошкового гальма, так як він створює гальмівний момент тільки при наявності електричного живлення, а сама його конструкція виключає механічне заклинювання частин.
Використання як навантажувача несамогальмівної передачі гвинт-гайка, гайка якої обертається і при цьому гальмується, значно спрощує конструкцію самого стенда та його експлуатацію. Відпадає необхідність у розробці спеціальних потужних гальмівних пристроїв поступального переміщення. Як гальмівні можуть використовуватися не тільки електромагнітні порошкові, а й будь-які інші серійні загальнодоступні гальма обертального принципу дії.
Використання ж керованих порошкових гальм дозволяє здійснювати будь-яке програмне навантаження в часі, що дає можливість імітувати експлуатаційні закони навантаження випробовуваного приводу поступального переміщення. Це підвищує достовірність експериментальної інформації про технічні характеристики і можливості досліджуваного електроприводу. Можливість дистанційного електричного керування гальмом забезпечує безпеку випробувань.
Стенд відрізняється універсальністю, оскільки дозволяє при одному і тому ж гальмі випробовувати приводи з різними рівнями максимальних навантажень. Для досягнення цих можливостей його зубчастий мультиплікатор може бути забезпечений комплектом змінних шестерен або виконаний у вигляді коробки передач. Виконання мультиплікатора у вигляді коробки передач дозволяє уникнути перемонтажу навантажувача. Можливість варіювання параметрами (кроком, числом заходів, діаметром) стендової гвинтової передачі дозволяє отримувати значні випробувальні осьові зусилля при малих значеннях гальмівного моменту, а, отже, малих габаритах і вазі гальма [6].
Відомий стенд для випробування гвинтових механізмів, що містить станину, на якій закріплені привід обертання, випробовуваний гвинтовий механізм, гідравлічний навантажувальний пристрій, виконаний у вигляді гідроциліндра двосторонньої дії, до обох порожнин якого підведені підвідні-відвідні гідролінії з встановленими в них регульованими дроселями, при цьому шток навантажувального пристрою кінематично пов’язаний з поступально рухомим елементом гвинтового механізму [7, фіг. 2].
Як привід обертання використовується навантажувальна гідромашина, забезпечена своєю системою гідроживлення через розподільник. Таким чином, є дві гідравлічні системи, взаємодія яких здійснюється за допомогою складної системи управління, що містить імпульсні датчики положення, цифро-аналогові перетворювачі, комутатор, блоки порівняння.
Недоліком відомого стенда є його складність, наявність безлічі допоміжних елементів системи управління, розгалуженість гідравлічних магістралей, підвищена витрата енергії для роботи двох незалежних гідронасосів, що забезпечують роботу двох самостійних гідравлічних систем живлення.
Поставлена задача спрощення конструкції і системи управління, зниження витрат енергії на функціонування стенда.
Поставлена задача вирішується тим, що в стенді для випробування гвинтових механізмів, який містить станину, на якій закріплені привід обертання, випробовуваний гвинтовий механізм, гідравлічний навантажувальний пристрій, виконаний у вигляді гідроциліндра двосторонньої дії, до обох порожнин якого підведені підвідні-відвідні гідролінії, при цьому шток навантажувального пристрою кінематично пов’язаний з поступально рухомим елементом гвинтового механізму, згідно з корисною моделлю, підвідні-відвідні гідролінії з’єднані між собою за допомогою кульового крана, що виконує роль регульованих дроселів. Крім того, гідроциліндр виконаний двоштоковим.
Суть технічного рішення пояснюється кресленням (рис 2), на якому пропонований стенд зображений схематично.
Стенд містить станину 1, на якій закріплений привід обертання 2 у вигляді електродвигуна, випробуваний гвинтовий механізм 3, гідравлічний навантажувальний пристрій 4. Електродвигун 2 кінематично з’єднаний з обертовим гвинтом 5 гвинтового механізму 3, гайка 6 якого жорстко з’єднана зі штоком 7, який поступально переміщається відносно корпусу 8 по направляючій шпонці 9. На корпусі 8 закріплені кінцеві вимикачі 10, 11, які при досягненні штоком 7 своїх крайніх робочих положень подають сигнал на реверсування електродвигуна 2.
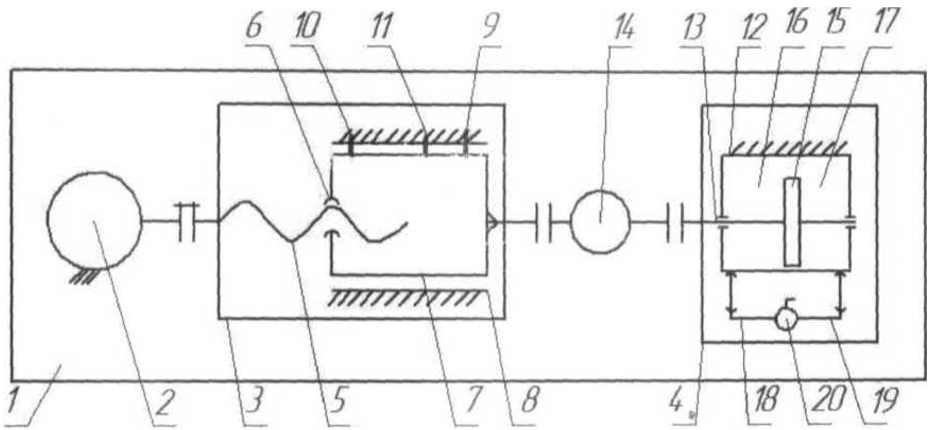
Рисунок 2 – Схема стенду з гідравлічним навантажувачем
Навантажуючий пристрій 4 виконано у вигляді двостороннього гідроциліндра 12, шток якого 13 кінематично пов’язаний зі штоком 7 гвинтового механізму, при цьому між ними встановлено силовимірювальний пристрій 14. Поршень 15 ділить об’єм циліндра на дві порожнини 16, 17, до яких підведені підвідні-відвідні гідролінії 18, 19 відповідно. Гідролінії 18, 19 з’єднуються між собою за допомогою кульового крана 20, який виконує функцію регульованих дроселів в кожній з гідроліній. Шток 13 виконано двостороннім.
Стенд працює таким чином. У початковому стані обидві порожнини гідроциліндра 16, 17 і гідролінії 18, 19 повністю заповнені рідиною, а кульовий кран 20 повністю відкритий. При вмиканні електродвигуна 2 обертальний рух гвинта 5 з допомогою гайки 6 перетвориться в поступальне переміщення штока 7 відносно корпусу 8 гвинтового механізму 3. Поступальне переміщення штоку 7 через силовимірювальний пристрій 14 передається штоку 13 і поршню 15. Поршень, що переміщується, 15 витісняє рідину з порожнин 16 або 17 (залежно від напрямку переміщення поршня 15) через підвідні-відвідні гідролінії 18, 19 відповідно. При повністю відкритому кульовому крані 20 роль нерегульованих дроселів виконують самі підвідні-відвідні гідролінії 18, 19. Створюваний ними гідравлічний опір визначається площею прохідного перерізу гідроліній. У порожнинах 16 або 17 при перекачуванні рідини в іншу порожнину через дросель створюється гідравлічний тиск, що діє на ефективну площу штока 15, завдяки чому на штоку 13 створюється гальмівне осьове зусилля, навантажує шток 7 гвинтової передачі. Величина створюваного гальмівного (навантажуючого) зусилля фіксується силовимірювальним пристроєм 14.
При повороті кульового крану 20 відбувається зменшення площі його прохідного перерізу, що призводить до збільшення протитиску в порожнинах 16, 17 гідроциліндра, та, відповідно, до збільшення гальмівного зусилля. Поворот крана 20 здійснюють до тих пір, поки не буде досягнуто задане значення випробувального зусилля. Після цього робота стенду здійснюється в автоматичному режимі. При досягненні штоком 7 своїх крайніх робочих положень спрацьовують кінцеві вимикачі 10, 11, які по ланцюгу зворотного зв’язку в системі управління подають команду на реверсування електродвигуна 2. При необхідності зміни величини випробувального навантаження встановлюють нове положення кульового крану. При ресурсних випробуваннях гвинтового механізму стенд може бути обладнаний лічильником циклів подвійних ходів штока 7.
При реверсуванні електродвигуна 2 автоматично відбувається реверсування випробувального навантаження, внаслідок чого при випробуваннях працюють обидві бічні поверхні витків нарізі.
Запропонована конструкція стенду відрізняється простотою, універсальністю, дозволяє регулювати випробувальне зусилля в широких межах, що не вимагає витрат енергії на функціонування гідравлічного навантажувального пристрою [8].
Відомий стенд для одночасного випробовування двох електроприводів, що включає станину, на якій встановлено два однакових електроприводи обертального типу, вихідні ланки яких кінематично пов’язані між собою [3, с. 80, рис. 2.37]. Електроприводи являють собою фланцеві електродвигуни змінного струму, з’єднані з несамогальмівними черв’ячними редукторами. Приводи з’єднані між собою за допомогою стендового редуктора з передавальним числом, рівним одиниці. Електродвигун черв’ячного редуктора, вал черв’ячного колеса якого з’єднаний з тим валом стендового редуктора, на якому розташоване колесо з меншим числом зубів, приводить в обертання з надсинхронною швидкістю двигун іншого редуктора, що виконує роль гальмівного генератора. Таким чином, один з приводів служить для створення навантаження на другий електропривод.
Недоліком відомого стенда є його повна непрацездатність для самогальмівних приводів як обертального, так і поступального типів.
У зв’язку з цим поставлена задача забезпечення працездатності стенда при одночасному випробуванні двох самогальмівних електроприводів як обертового, так і поступального типів.
Поставлена задача вирішується тим, що стенд для одночасного випробування двох електроприводів, що включає станину, на якій встановлено два однакових електропривода поступального або обертального типу, вихідні ланки яких кінематично пов’язані між собою, забезпечений системою управління взаємодією приводів, яка включає пристрій для задання випробувального навантаження, вимірювання створюваного навантаження і порівняння останніх по кожному з приводів, при цьому кожен пристрій для вимірювання навантаження встановлено послідовно з вихідною ланкою і жорстко пов’язане з нею, а пристрої для задання навантаження налаштовані на величини, що відрізняються між собою не менше, ніж на величину чутливості системи управління, і забезпечені перемикачем для перехресного їх підключення.
Крім того, в системі управління задіяні кінцеві вимикачі одного з випробовуваних електроприводів поступального типу. Електроприводи поступального типу можуть бути встановлені паралельно між собою, а їх вихідні ланки з’єднані між собою хитним рівноплечим коромислом, пов’язаним зі станиною. Приводи поступального типу можуть бути встановлені співвісно один до одного і з’єднані між собою. Суть запропонованого технічного рішення пояснюється кресленнями, де на рис. 3 схематично зображений стенд з паралельним розташуванням електроприводів, а на рис. 4 – зі співвісним розташуванням.
Рисунок 3 – Схема стенду з паралельним розташуванням електроприводів
Стенд (рис. 3) містить станину 1, на якій встановлено два однакових електроприводи поступального переміщення 2, 3. Приводи 2, 3 приєднані шарнірно до станини 1 одним кінцем. Приводи 2, 3 встановлені на станині 1 так, що їхні осі (вихідні ланки 4) паралельні один одному або співвісні (рис. 4). У першому випадку вихідні ланки 4 з’єднані між собою хитним відносно осі 5 рівноплечим коромислом 6.
Система управління роботою стенда містить два ідентичних автономних контури регулювання, в кожний з яких по одному входять пристрої 7, 8 для задання випробного навантаження, пристрої 9, 10 для порівняння заданого і дійсного навантаження, блоки 11, 12 підсилювачів сигналу помилок, електроприводи 2, 3, пристрої 13, 14 для вимірювання навантаження, що є датчиками зворотного зв’язку.
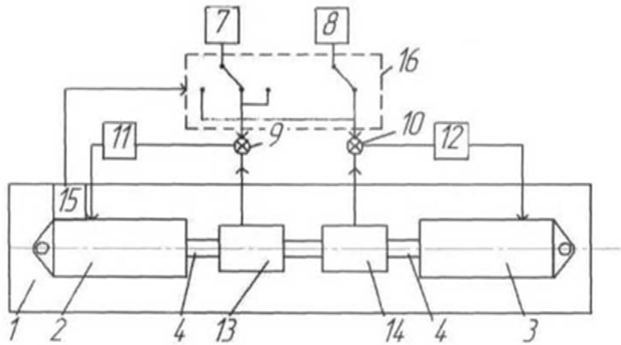
Рисунок 4 – Схема стенду зі співвісним розташуванням електроприводів
Для забезпечення реверсу в системі задіяні кінцеві вимикачі 15, що спрацьовують при крайніх робочих положеннях вихідної ланки 4 одного з електроприводів, наприклад 2, а також перемикач 16 для перехресної подачі сигналів з пристрів 7, 8 на блоки порівняння 9, 10.
Стенд працює таким чином. Заданий рівень навантажень на пристроях 7, 8 при включенні стенда досягається за рахунок зведення до нуля сигналів помилок на входах блоків 11, 12. Якщо рівні заданих навантажень однакові, то після їх досягнення приводи 2, 3 вимикаються. Зменшення або збільшення рівня навантаження на одному з пристроїв 7 або 8, навіть на величину чутливості контурів, призводить до включення в роботу електроприводів 2, 3, які прагнуть компенсувати перерегулювання і недорегулюрування по зусиллю на вихідних ланках сторони зубів в приводах обертального переміщення або витків нарізі в приводах поступального переміщення. Якщо приводи мають однакову швидкодію, то їх робота здійснюється плавно і безперервно з малими змінами (в межах різниці рівнів налаштування контурів регулювання) заданих навантажень. Якщо ж швидкодія приводів відмінна, то можлива робота їх з зупинками, реверсами.
Стенд дозволяє проводити випробування самогальмуючих електроприводів обертового і поступального типів. Випробуванням піддаються одразу два електроприводи. Стенд не вимагає застосування спеціальних гальмівних (навантажувальних) пристроїв. Як навантажувальний пристрій використовується другий випробуваний електропривід. Випробувальне навантаження змінюється в широких межах за величиною, крім того, воно може бути знакозмінним. Система управління стендом забезпечує автоматичне реверсування приводів поступального переміщення при досягненні ними своїх крайніх робочих положень, а також реверсування випробного навантаження [9].
Розглянуті існуючі стенди для випробувань електромеханічних приводів поступального і обертового рухів робототехнічних систем, їх переваги і недоліки. Розроблені удосконалення деяких стендів. Технічні рішення визнані винаходами [6, 8, 9].
Посилання
- Детали и механизмы роботов: Основы расчета, конструирования и технологии производства / Р. С. Веселков, Т. Н. Гонтаровская, В. П. Гонтаровский и др. Под ред. Б. В. Самотокина. – К.: Выща шк., 1990. – 343 с.
- Механика промышленных роботов: учеб. пособие для втузов: кн. 2. Расчет и проектирование механизмов / Е. И. Воробьев, О. Д. Егоров, С. А. Попов. – М.: Высшая школа, 1988. – 367 с.
- Машины и стенды для испытания деталей / под ред. Д. Н. Решетова. – М.: Машиностроение, 1979.–343 с.
- Турпаев А. И. Винтовые механизмы и передачи. – М: Машиностроение, 1982. – 224 с.
- А. С. СССР № 1310666 А1, С01М 13/02. Стенд для испытания винтовых передач / Л. Е. Пелевин, заявл. 29.10-85; опубл. 15.05.87. Бюл. № 18.
- 01M 13/02 на корисну модель «Стенд для випробувань гвинтових механізмів», Дудніков В. С., Шевцов М. С.; № u201505391; заявл. 02.06.2015; опубл. 10.12.2015. Бюл. №23.
- А. С. СССР № 985485, F16В 19/00. Стенд для испытания винтовых преобразователей / В. М. Рюмшин, А. Н. Левин, С. М. Беспечный; заявл. 26.09.1980; опубл. 30.12.1982.
- 01M 13/02 на корисну модель «Стенд для випробувань гвинтових механізмів», Дудніков В. С., Шевцов М.С.; № u201505390; заявл. 02.06.2015; опубл. 25.01.2016. Бюл. №2.
- Патент України №103222, G01M 13/02 на корисну модель «Стенд для одночасного випробування двох електроприводів», Дудніков В. С., Шевцов М. С.; № u201505059; заявл. 25.05.2015; опубл. 10.12.2015. Бюл. №23.