Сучасні БПЛА та розрахунок шумів їх гвинтів
Сергій Вікторович Алексєєнко
Дніпровський національний університет імені Олеся Гончара, Дніпро
Галина Іванівна Сокол
Дніпровський національний університет імені Олеся Гончара, Дніпро
Денис Вікторович Михальов
Дніпровський національний університет імені Олеся Гончара, Дніпро
Вступ
Безпілотні літальні апарати (БПЛА), часто відомі як дрони, є однією з найпопулярніших технологій сучасності. Вони представляють собою літальні апарати, що не потребують присутності пілота на борту [1]. Завдяки широкому спектру застосувань та технологічному прогресу, сучасні БПЛА відкривають безліч нових можливостей у різних галузях. На сьогодні є два основних напрямки використання безпілотних літальних апаратів:
1. Військовий напрямок(розвідувально-наглядовий та ударно-бойові БПЛА);
2. Цивільний напрямок( фото- та відеозйомка, геодезія та картографія).
Безпілотні літальні апарати можуть мати різну конструкцію та розмір. Вони можуть бути мультироторними (з декількома гвинтами) або мати фіксоване крило.
Сучасні БПЛА вражають своїми технічними характеристиками. Вони здатні до автономних польотів на великі відстані, мають системи автоматичного пілотування, GPS-навігацію, системи уникнення перешкод, живлення з батарей та інтегровані керуючі системи, що спрощують їх експлуатацію.
При польоті вузли БПЛА випромінюють шум у навколишнє середовище, при цьому основним вузлом випромінювання є його гвинт. У цивільній сфері шум безпілотника може викликати у людей шумове роздратування, а у військовій сфері, реєструючи цей шум можна провести його пеленг та знищити летальний апарат. Щоб позбавитися цих шкідливих факторів і виникає потреба в розрахунку акустичного поля гвинта БПЛА.
Мета та задачі
Метою роботи стало дослідження та аналіз шумів гвинтів БПЛА та були вирішені такі задачі: проаналізовано шуми, що виникають при роботі БПЛА, складено методику розрахунку характеристик акустичного поля гвинта БПЛА та запропоновані методи зниження шумів гвинтів.
Опис досліджуваного БПЛА та його основного обладнання акустичного випромінювання
Модель [1] FPVraptor V2 спеціально проектувалася для польотів c фотокамерою на борту. Тобто цей БПЛА призначений для польотів з відео. Але це зовсім не означає, що цей планер можна запускати тільки з FPV обладнанням, він чудово літає і без нього. FPVraptor V2 володіє хорошими льотними якостями і не вибагливий до навичок пілота. Він дуже стійкий в польоті, і може досить довго перебувати в повітрі (рис. 1).

Рисунок 1 – БПЛА FPVraptor V2, що оснащений фотокамерою
При проектуванні даного БПЛА розробники постаралися врахувати основні вимоги, які пред’являються для FPV моделей, а саме великий акумуляторний відсік, місце під кріплення камери з можливістю установки поворотного пристрою, місце для установки відео-передавача на хвостовій балці, зручний доступ у відсік з електронікою, модульну конструкцію силової установки, яка дозволяє легко отримати доступ до силовій електроніці. Розроблена модульна конструкція силової установки, яка дозволяє легко отримати доступ до силової електроніки. Модель планера, який рухається під впливом складного гвинта і вписується в жорсткі вагові рамки. Тим самим забезпечені прийнятні значення навантаження на крило, що в складних погодних умовах є критично необхідною складовою повернення моделі з великої відстані, при високому ступені розряду батареї.
Гвинт Volantex 1060 Propeller Set зображений на рис. 2.

Рисунок 2– Гвинт Volantex 1060 Propeller Set
Відноситься до нового покоління складних гвинтів. Оптимізована конструкція з дуже тонким профілем і комп’ютерний розрахунок аеродинамічних поверхонь гарантують високу точність при оптимальній ефективності та низькому енергоспоживанні двигуна. Гвинт виготовлений виключно з вуглецевого волокна, обробленого нейлоном для забезпечення високої жорсткості на скручування.
Електродвигун VOLANTEX B4023/Kv1050 зображений на рис. 3.
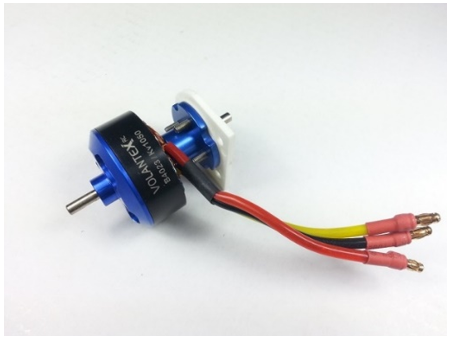
Рисунок 3 – Електродвигун VOLANTEX B4023/Kv1050
Основні характеристики електродвигуна:
- Потужність 260 Вт;
- Швидкість обертання двигуна в хвилину 1050 об/хв;
- Створювана тяга 0,8 кг;
- Напруга живлення 11,1 В;
- Діаметр валу 3 мм.
Джерела шумів БПЛА
Основними джерелами шуму від БПЛА [2] при польоті є його двигуни та їх гвинти. Крім того, шум створює корпус літака та його обладнання внаслідок вібрацій, які викликаються неврівноваженістю вузлів та гвинтів. Нещільні з’єднання, погано закріплені агрегати обладнання викликають вібрації в обшивці БПЛА. У безпілотнику FPVraptor використовується електричний двигун, який є найтихішім серед двигунів, які використовують у конструкціях літаків. За умови, що деталі безпілотника з’єднані щільно та агрегати обладнання закріплені надійно, головним джерелом шуму є гвинт. Застосування розробленої теорії та пакету програм MathCad дозволяє провести розрахунки звукового тиску, який виникає під час обертання лопотів гвинтів у повітрі.
Методика розрахунку акустичного поля гвинта БПЛА за допомогою програми MathCad
Для створення методики розрахунків використовуємо математичну модель, що запропонована Л. Я. Гутіним [3]. На кожен елемент гвинта діють дві сили: аеродинамічна сила та опір обертальному руху. З законів механіки випливає, що цей елемент, своєю чергою, впливає на середу з рівними за величиною та протилежно спрямованими силами. Точки застосування цих сил будемо вважати зосередженими в одній площині, так як осьове протяг лопаті дуже малий в порівнянні з довжинами хвиль перших гармонік. То джерело випромінювання вважатимуться точковим. Звуковий тиск розраховується за формулою:

(1)
для розрахунку звукового тиску, необхідні такі вхідні дані:
- m – номер гармоніки,
 , де n – кількість оборотів за хвилину на валу двигуна, рад/с,
, де n – кількість оборотів за хвилину на валу двигуна, рад/с,- n = 5827 об/хв,
- j – кількість лопатей гвинта. У нашому випадку – 2,
- R – довжина лопаті гвинта. R = 0.1325 м,
- W – потужність, W = 260 Вт.
Математичні розрахунки були виконані за допомогою пакету MathCad [4-5]. Необхідно ввести до програми величини, які застосовуються у формулі (1).
- Створюємо вектор-стовбець m, який містить 5 значень, від 1 до 5, що відповідають номерам гармонік.
- Заносимо у змінну n значення обертів на хвилину, 5827.
- Присвоюємо значення 2 змінній j, яка відповідає за кількість лопатей у гвинті.
- До змінної с, яка є швидкістю звуку у повітрі, заносимо значення 343 м/с.
- Розраховуємо значення кутової швидкості:
 .
. - Розраховуємо значення частоти звуку:
 .
. - Розраховуємо значення довжини хвилі:
 .
. - Розраховуємо значення відстані, з якої починається дальнє поле:
 та заносимо до матриці r.
та заносимо до матриці r. - Розраховуємо площу лопаті гвинта S як суму площин двох трикутників та прямокутника.
- Розрахуємо швидкість потоку повітря:
 .
. - Занесемо у змінну p0 значення атмосферного тиску: 101325.
- Занесемо у змінну ρ значення густини повітря: 1,29.
- Розрахуємо повітряний тиск:
 .
. - Розрахуємо аеродинамічну силу:
 .
. - Розрахуємо обертальний момент на валу:
 .
. - Розрахуємо хвильове число:
 .
. - Аргументом функції, яка розраховує тиск, є кут обертання. Необхідно задати дискретність зміни кута, початкове та кінцеве значення у радіанах.
Заносимо усі змінні до формули (1).
У формулу необхідно вставити вбудовану функцію Бесселя. Для цього необхідно вибрати меню «Вставка» та підпункт меню «Функція». Це також можна виконати за допомогою комбінації клавіш Ctrl + E. У діалоговому вікні необхідно в категорії функції вибрати «Бесселя» та вибрати Jn, що є функцією Бесселя першого роду m-го порядку. Додана функція має два аргументи: m та z. У перший заносимо номер гармоніки, у другий − добуток хвильового числа на довжину лопаті гвинта та синус кута прослуховування, тобто кута між радіус-вектором проведеним з центру обертання до місця прослуховування звуку та напрямком польоту БПЛА.
- Створимо ще 4 аналогічні функції для 4-х інших гармонік, змінюючи лише m та r.
Побудуємо полярний графік (рис. 4) для функцій p1, p2, p3, p4 та p5, де p1 – функція для основного тону, а p2, p3, p4 та p5 – функції для гармонік основного тону.
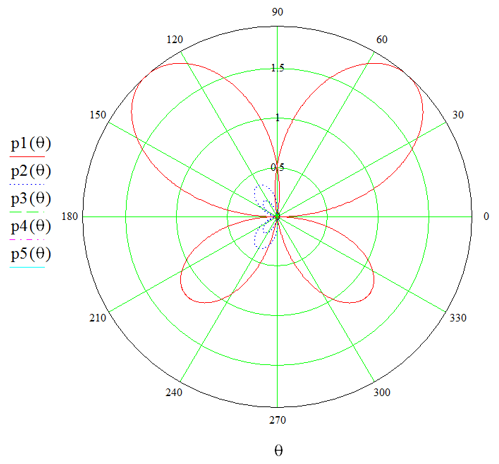
Рисунок 4 – Полярний графік спрямованості звукового тиску для основного тону – p1, та для його гармонік – p2, p3, p4 та p5.
Звуковий тиск прийнято вимірювати в dB, а не в Па. Це зумовлено тим, що логарифмічна шкала виключно зручна для відображення дуже великих діапазонів значень величин. Перетворимо рівень звукового тиску в dB. Полярний графік залежності звукового тиску основного тону та його гармонік, радіусом для якого являється звуковий тиск в dB наведено на рис. 5.
Слід зазначити, що при вільному розповсюдженні рівень звукового тиску буде скорочуватись приблизно на 6 дБ при кожному подвоєнні відстані від джерела.
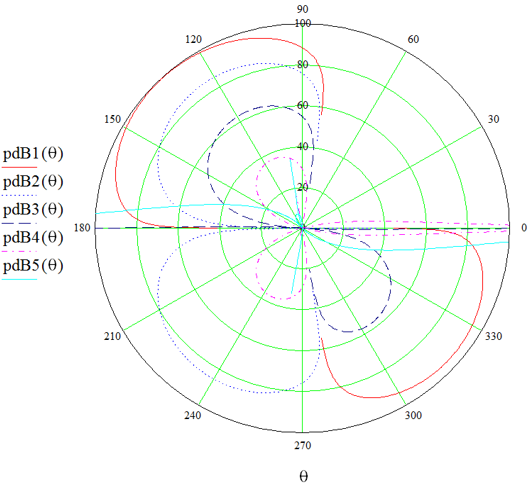
Рисунок 5 – Полярний графік направленості акустичного поля для основного тону та його гармонік (рівень звукового тиску в dB).
Результати розрахунків
З аналізу джерел шумів з конструктивних елементів БПЛА бачимо, що головним джерелом шуму є гвинт літака.
На основі даних розрахунків, що наведені на графіках (див. рис. 4-5) маємо, що найбільший рівень звукового тиску спостерігається для основного тону, менший рівень для його другої гармоніки, ще менший для третьої, і так далі. Для основного тону максимальний рівень звукового тиску становить 1.9222 Па, або 99.655 dB, що спостерігається при кутах приблизно 132º та 48º.
Методи зниження шумів
Один із заходів щодо зменшення рівнів шумів, який можна вжити – це вибрати гвинт більшої довжини, але з меншим кутом установки лопатей, щодо площини обертання. Величина підйомної сили при цьому зберігається. Однак швидкість обертання зменшується, що впливає на рівень звукового тиску вбік зниження рівня шумів перших гармонік. Разом зі зменшенням значення обертів гвинта економиться заряд акумуляторів, його вистачить на більший час. Доцільно використовувати карбонові лопаті гвинтів, які є міцними, легкими і зберігають свої властивості в широкому діапазоні температур.
Висновки
1. Розглянута досліджувана модель БПЛА FPVraptor V2 та його основного обладнання акустичного випромінювання.
2. Розглянуті джерела шумів БПЛА.
3. Розроблена програма-методика розрахунків характеристик акустичних полів гвинта безпілотного літального апарата FPVraptor v2.
4. Проведені розрахунки звукового тиску в оточуючому гвинт повітряному середовищі. Розрахунки проведені для п’яти гармонік шуму. Показано, що рівень звукового тиску найбільш великий для першої гармоніки . Він складає приблизно 99 дБ на відстані в одну довжину хвилі цієї гармоніки.
Посилання
- Михальов Д. В., Сокол Г. І. Розрахунок характеристик акустичного поля гвинтів БПЛА: XXIII Міжнародна молодіжна науково-практична конференція «Людина і космос»: Збірник тез. Дніпро, 2021. С.10.
- Самохин В. Ф., Остроухов С. П., Мошков П. А. Экспериментальное исследование источников шумности беспилотного летательного аппарата с винто-кольцевым движителем в толкающей компоновке: Электронный журнал. «Труды МАИ» 2012. Вып. 70. С.20-32. URL: https://www.mail.ru/science/trudy.
- Гутин Л. Я. Избранные труды: Судостроение. Л., 1977. 730 с.
- Сокол Г. І., Алексєєнко С. В., Михальов Д. В. Характеристики акустичного поля гвинта БПЛА: Системне проектування та аналіз характеристик аерокосмічної техніки: Зб. Наук. Праць, том XXXI / за наук. Ред. докт. техн. наук , проф. М. М. Дронь. Дніпро: Ліра, 2022. С. 81-94.
- Прикладні дослідження в механиці та механотрониці. Звіт про науково-дослідну роботу (остаточний) ФТФ-23-19 / під кер д.т.н., доцента С. В. Алексєєнко. Дніпро, 2021. С. 155. УКПП № держреєстрації 0119U101151 / Алексєєнко С. В., Сокол Г. І., Михальов Д. В. ті ін.