3D друк при виготовленні деталей у робототехніці
Сергій Вікторович Алексєєнко
Дніпровський національний університет імені Олеся Гончара, Дніпро
Галина Іванівна Сокол
Дніпровський національний університет імені Олеся Гончара, Дніпро
Вікторія Сергіївна Федоріна
Дніпровський національний університет імені Олеся Гончара, Дніпро
Сьогодні за допомогою сучасних 3D принтерів можна виготовити практично будь-яку тривимірну деталь за відносно невеликий час. Хоча спочатку технології 3D-друку в основному використовувалися для прототипування, зараз удосконалені технології та матеріали дозволяють друкувати не просто макети, а функціональні вироби, придатні для повсякденної експлуатації [1, 2]. При цьому головною перевагою 3D-друку над традиційними виробничими технологіями вважається принцип «прямого виробництва», коли готові вироби друкуються безпосередньо з цифрових моделей, можуть мати практично будь-яку форму, без відходів матеріалу та необхідності використання інструментів та дорогого оснащення.
Однією з численних сфер застосування технології 3D-друку є освітня робототехніка, що дозволяє розробляти та створювати діючі моделі роботів, і, відповідно, значно покращити практичну складову та розширити можливості вивчення дисциплін, пов’язаних із робототехнікою та механотронікою, як у вищій школі, так і значно посилювати інтерес до такого роду додаткової освіти у школярів.
У роботі продемонстровані можливості використання технології 3D друку під час реалізації проекту «Інтелектуальний робот-маніпулятор», який виконується на кафедрі механотроніки фізико-технічного факультету Дніпровського національного університету імені Олеся Гончара спільно з інжиніринговою школою «Ноосфера». В якості прикладу наведено процес проектування та виготовлення деталі «основа».
Послідовність кроків реалізації технології друку була наступною:
- із використанням системи автоматизованого проектування «AutoCAD» була розроблена конструкція, обрано форму, задано розміри та створено технічне креслення деталі «основа»;
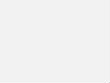
- в якості матеріалу деталі було обрано пластик ABS plus, створено цифрову твердотільну модель, яка була відкоригована з урахуванням деформацій, які виникають в процесі 3D друку, файл збережено у форматі .stl (рис. 1);
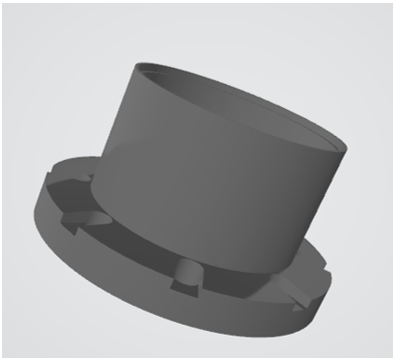
Рис. 1. Зовнішній вигляд твердотільної моделі
- підготовлено файл для друку у програмі «Cura Ultimaker», налаштовано параметри друку, такі як висота шару, ширина лінії, заповнення, задано температуру та режими охолодження, відповідно до обраного матеріалу, швидкість друку, переміщення, тощо. Обрано розташуваня детали відносно стола принтера з урахуванням особливостей форми деталі та процесу 3D друку (рис. 2), задано підтримку та тип прилипання до столу. Перед друкуванням рекомендується здійснити попередній перегляд друку, щоб переконатися, що всі налаштування вірні;
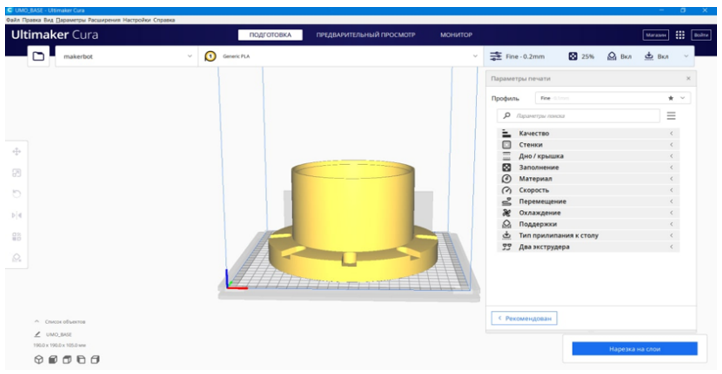
Рис. 2. Розташування деталі відносно стола принтера
- друк на кастомному 3D принтері типу Ultimaker;
- відділення деталі від робочого столу, видалення елементів підтримки, постобробка та фарбування (рис. 3).
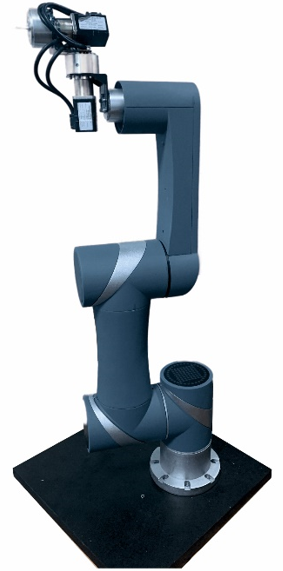
Рис. 3. Зовнішній вигляд проекту «Інтелектуальний робот‑маніпулятор»
Таким чином в роботі продемонстровано можливості використання 3Д друку в робототехніці на прикладі освітнього проекту «Інтелектуальний робот-маніпулятор». Для розробки деталей та технологічного процесу їх виготовлення використано сучасну систему автоматизованого проектування «AutoCAD» та програміу підготовки до 3D друку «Cura Ultimaker». Друку виробу здійснено на кастомному 3D принтері типу Ultimaker.
Посилання
- The History of 3D Printing: 3D Printing Technologies from the 80s to Today. Sculpteo. URL: https://www.sculpteo.com/en/3d-learning-hub/basics-of-3d-printing/the-history-of-3d-printing/%20
- Учасники проектів Вікімедіа. 3D-принтер. Вікіпедія. URL: https://uk.wikipedia.org/wiki/3D-принтер